Busardo

Busardo es mi segundo diseño de cohete amateur. En esta ocasión se trata de un modelo de cohetería de media potencia (MPD, Mid-Power Rocketry), preparado para utilizar motores comerciales E20-8, aunque puede adaptarse fácilmente a otros tipos de propulsión con el simple diseño de un adaptador.
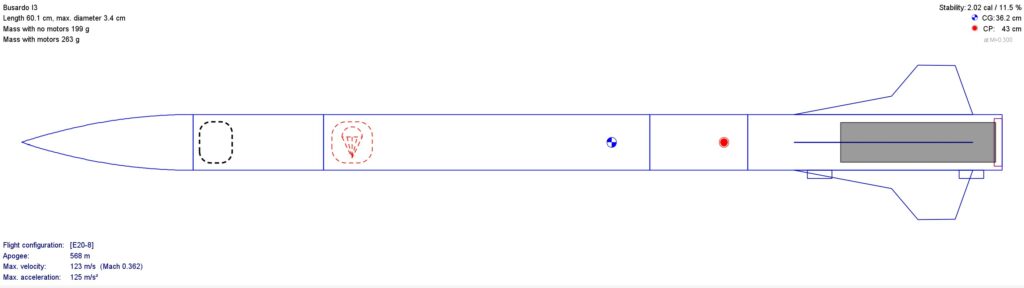
El cohete mide 60,1 cm de longitud y 3,4 cm de diámetro, con un peso aproximado de 160 gramos sin motor ni lastre. Al igual que su predecesor, está impreso íntegramente en 3D con PLA estándar.
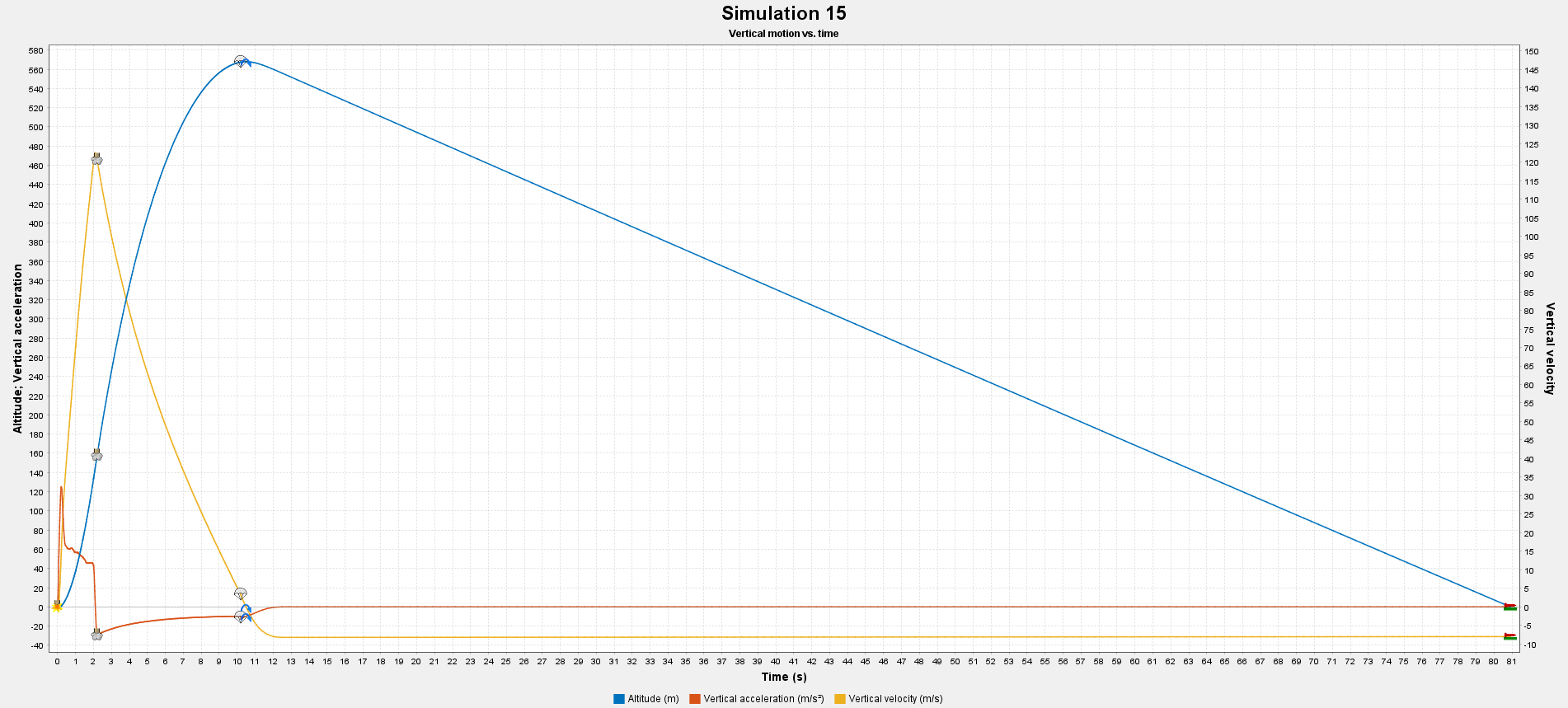
Según las simulaciones realizadas con OpenRocket, y con un lastre de 40 gramos, el Busardo puede alcanzar un apogeo de unos 550–570 metros y una velocidad máxima de 118–123 m/s (Mach ≈ 0,35) bajo buenas condiciones meteorológicas. En otras palabras, sube bastante para ser tan pequeño. También puede lanzarse con menos peso —desde unos 20 gramos de lastre— si se desea un vuelo algo más animado (y una recuperación potencialmente más entretenida).
En la configuración con motor E20-8, el centro de gravedad (CG) se encuentra a 36,2 cm desde la punta del morro y el centro de presión (CP) a 43,0 cm, lo que proporciona una margen de estabilidad de 2,02 calibres (≈11,5 %).
Estos valores pueden variar ligeramente en función del lastre instalado, por lo que se recomienda ajustar el peso para mantener una estabilidad de al menos 1,5 calibres en vuelo.
La masa sin motor es de 160 g, y con motor E20-8 asciende a 263 g. La aceleración máxima estimada es de 125 m/s², con un apogeo que ronda los 568 m según las simulaciones.
El sistema de recuperación utiliza un paracaídas autoconstruido de unos 37 cm de radio (≈74 cm de diámetro), que asegura una velocidad de descenso aproximada de entre 2,5 y 2,8 m/s, dependiendo del peso final en vuelo.







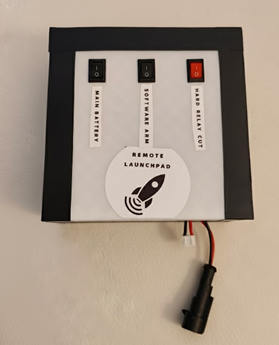
Remote LaunchPad
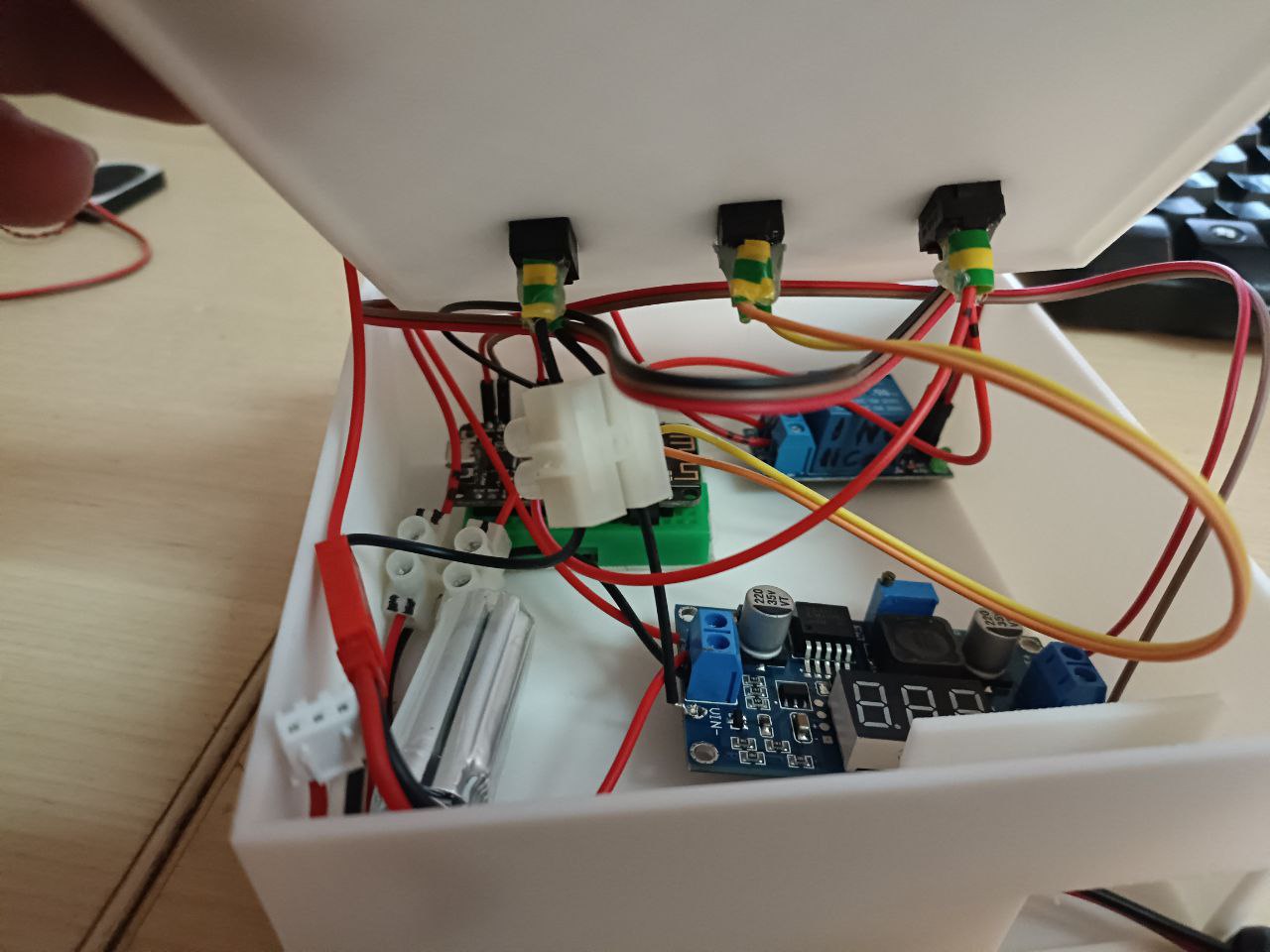
Es la primera vez que uso Remote LaunchPad. He montado un ignitor remoto sencillo compuesto por dos partes principales: el propio ignitor electrónico —basado en un ESP8266 que actúa como punto de acceso Wi-Fi y expone una pequeña API para activar un relé— y una app para Android que conecta con el módulo y envía la orden de disparo.
Características destacadas:
Ignitor: ESP8266 configurado como Access Point para evitar depender de redes externas; recibe comandos por HTTPS y acciona un relé que cierra el circuito del iniciador.
App Android: interfaz mínima para conectar al módulo, armar/desarmar y disparar; pensada para ser sencilla y fiable en campo.
Simplicidad y portabilidad: diseño pensado para lanzamientos seguros y rápidos y sin necesidad de infraestructura de red.
Descarga
Puedes descargar todos los archivos STL del proyecto Busardo en Thingiverse.
Lo he impreso con PLA normal en una Ender 3 V3 con una altura de capa de 0.12mm y soportes de árbol.
Recomiendo bajar un poco la velocidad de impresión para que haga bien los detalles. Se puede imprimir el cohete entero o por piezas. Después de los primeros vuelos las únicas piezas algo desgastadas son los adaptadores del motor.
Puedes descargar la simulación de OpenRocket para, por ejemplo, probar el peso y posición del lastre.
OpenRocket es un simulador de cohetes modelo gratuito y con todas las funciones que te permite diseñar y simular tus cohetes antes de construirlos y lanzarlos.
Descargar OpenRocket: https://openrocket.info/
Remote LaunchPad es un proyecto de slopez.tech. Todavía está en desarrollo aunque ya ha sido probado así que lo puedes usar.
Si no deseas utilizarlo, igualmente puedes encender el motor del cohete con facilidad: solo tienes que hacer un cortocircuito con una batería (yo uso una 2s) para encender el ignitor. Si vas a hacerlo así, te recomiendo usar también un interruptor (toda seguridad es poca) y un cable bastante largo para poder alejarte del pad.
Instrucciones de montaje
Impreso en mi Ender 3 V3 con una altura de capa de 0,12 mm, en piezas separadas. Todas las piezas juntas son > 9 horas de impresión y te arriesgas a que alguna salga mal.
No fue necesaria balsa de impresión, aunque sí se requirieron soportes tipo árbol.
Recomiendo ajustar la impresora a una velocidad ligeramente más baja para evitar imperfecciones en la superficie.
Por ahora, solo tengo el adaptador para motores comerciales E20 (95mm x 24mm).
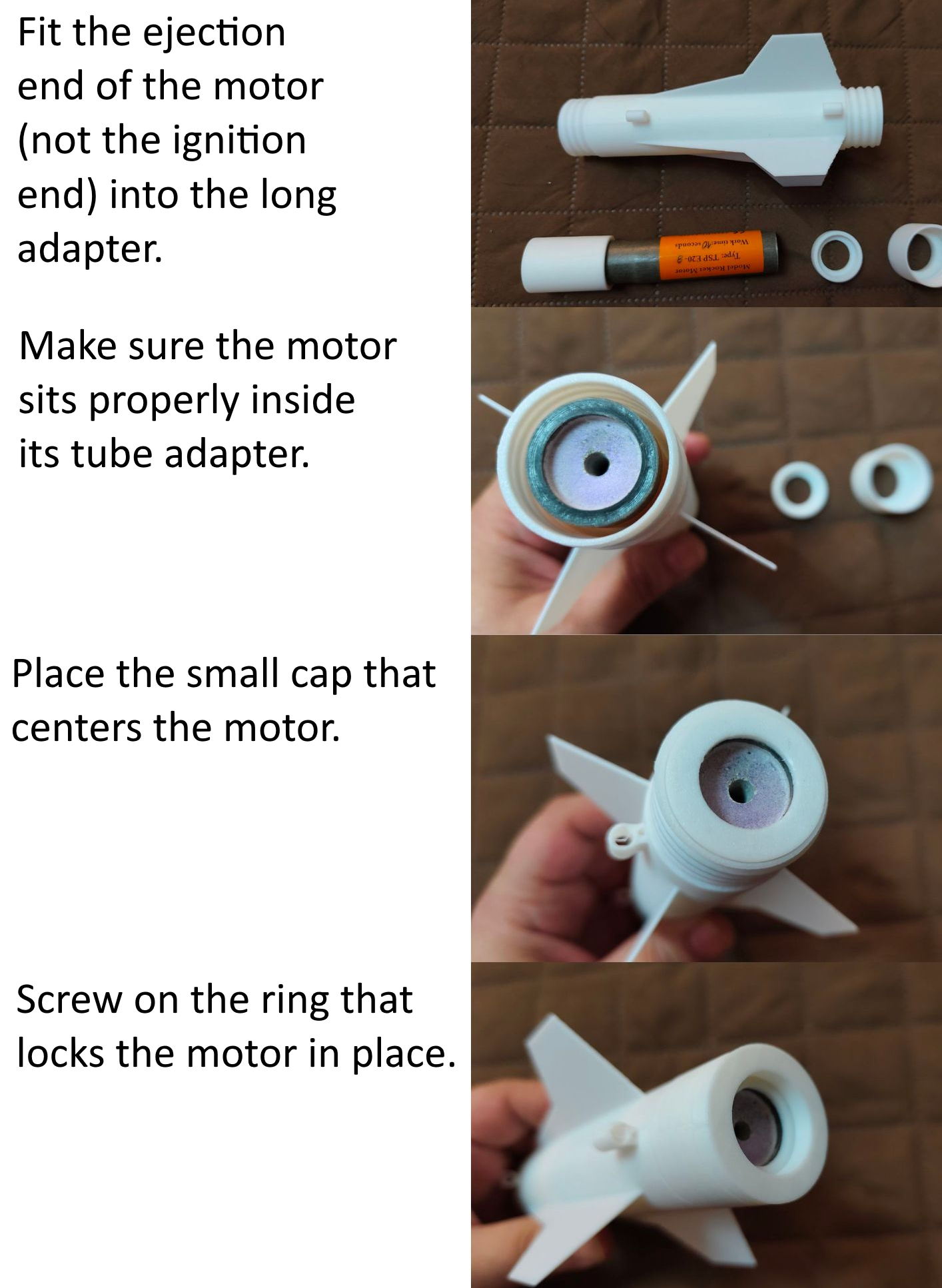
El motor debe quedar perfectamente encajado y alineado en la bahía. Introduce primero el adaptador largo y encaja la salida de gases del motor para el sistema de recuperación dentro. Luego introduce el adaptador pequeño que se encarga de centrar la salida del motor. Por último, enrosca el tapón que se encarga de retener el motor.
Con el motor encajado, no olvides de poner algo ignifugo entre el motor y la etapa del cohete que contiene el paracaídas, para evitar que este se queme.
Para atar el paracaídas y la cofia, he usado cuerda de kevlar de 180cm (3 distancias del cohete). Haz un nudo resistente en la cruz de la interetapa y otro en el adaptador de la cofia.
El paracaídas debe ir sujeto a pocos cm de la cofia, lejos de la etapa del cohete.
Para los primeros vuelo hemos usado un paracaídas hecho a mano con plástico ligero y 8 puntos de fijación, con un radio de 37cm. Hemos hecho un agujero en medio para ayudar a que no se lo lleve tanto el viento. Si vas a comprar uno comercial, intenta que sea de una medida parecida.
Para asegurar un vuelo estable hay que añadir algo de peso en la cofia. Puede ser carga útil (como un registrador de datos de vuelo) o una cámara pequeña (haré una cofia adaptada en el futuro).
Si no quieres ponerle carga útil, hay que añadirle lastre: yo uso plomos de pesca. Para los primeros vuelos hemos utilizado 30g y 40g, que es más o menos lo que pesará la cámara o el FDR.
Para una carga de 30-40g, utiliza el elevador de 4cm que también puedes descargar en Thingiverse. Pega todas las piezas con un poco de silicona para que no se mueva nada durante el vuelo.

Simulación de vuelo
Recuerda que para la simulación usamos un motor comercial E20-8 (retardo de 8 segundos antes de abrir el paracaídas) y 40g de lastre.